






Selective magnetic manipulation

Magnetic manipulation is an effective method for small objects. However, most magnetic manipulation methods are based on largely global fields affecting all objects in the workspace. Selective manipulation, i.e., manipulating single magnetic objects without affecting the population of objects, or simultaneously manipulating several objects independently, is a great challenge.
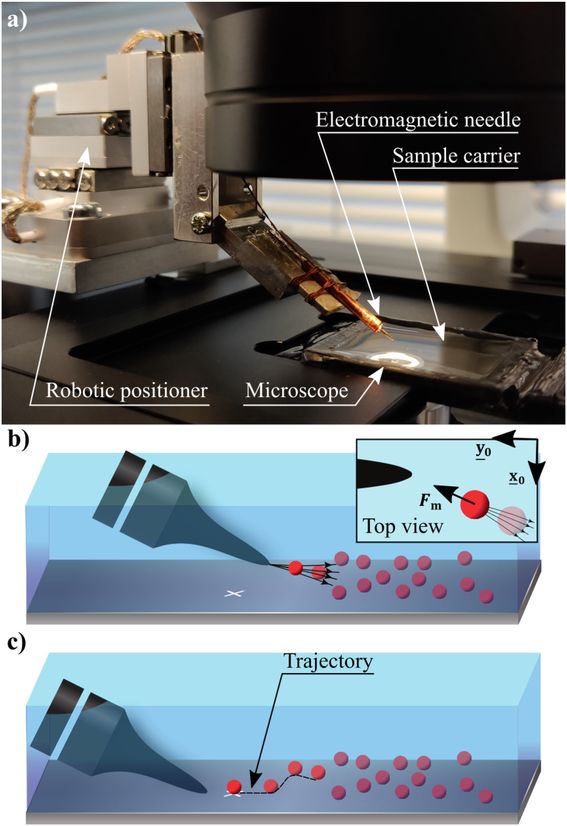
In this research, we have developed highly selective manipulation methods utilizing localized electromagnetic fields with the presence of other similar particles in a liquid medium. Using micro-sharp magnetic needles, we can selectively pick microparticles just several micrometers away from their neighbor and place them next to each other, or contactless extract selected single particles from a population, separate particles with about ten micrometers gap, independent manipulation particles and deliver them onto separate cells. This method can characterize the localized viscosity of non-newtonian liquid and the mechanical properties of magnetic pillars. Additionally, we can also manipulate particles using two robotic electromagnetic needles cooperatively, and simultaneously manipulating two particles independently.

Selected publications:
- Seon, J.A., Cenev, Z., and Zhou, Q., “Automatic Noncontact Extraction and Independent Manipulation of Magnetic Particles Using Electromagnetic Needle”, IEEE/ASME Transactions on Mechatronics, 25 (2), 931-941, 2020.
- Al-Azawi, A., Cenev, Z., Tupasela, T., Peng, B., Ikkala, O., Zhou, Q., Jokinen, V., Franssila, S. and Ras, R.H., Tunable and Magnetic Thiol–ene Micropillar Arrays, Macromol. Rapid Commun., vol. 41, no. 2, p. 1900522, Nov. 2019.
- Cenev, Z., Zhang, H., Sariola, V., Rahikkala, A., Liu, D., Santos, H.A., and Zhou, Q., “Manipulating Superparamagnetic Microparticles with an Electromagnetic Needle”, Advanced Materials Technologies, 3 (1), 1700177, 2018
- Mohammadi, P., Aranko, S., Lemetti, L., Cenev, Z., Zhou, Q., Virtanen, S., Landowski, C.P., Penttilä, M., Fischer, W.J., Wagermaier, W., Linder, M.B., “Phase transitions as intermediate steps in the formation of molecularly engineered protein fibers”, Communications Biology, 1 (1), 86, 2018.
- Işıtman, O., Bettahar, H. and Zhou, Q., "Non-contact cooperative manipulation of magnetic microparticles using two robotic electromagnetic needles", IEEE Robotics and Automation Letters, 7(2), pp.1605-1611, 2021.
- Isitman, O., Kandemir, H., Alcan, G., Cenev, Z. and Zhou, Q., "Simultaneous and Independent Micromanipulation of Two Identical Particles with Robotic Electromagnetic Needles", 2022 International Conference on Manipulation, Automation and Robotics at Small Scales (MARSS), Toronto, 25-29 July 2022. (Best Robotics Paper)